Como funciona o sistema de navegação autônoma do rover Perseverance?
Por Wyllian Torres • Editado por Patricia Gnipper |
Desde que pousou em Marte em fevereiro deste ano, o rover Perseverance já executou tarefas marcantes, como, por exemplo, a produção de oxigênio a partir do dióxido de carbono extraído no planeta. No entanto, seu principal objetivo é procurar por sinais de vida marciana antiga e, para isso, a equipe responsável pelo robô de seis rodas se concentra no planejamento das rotas de navegação, usando um sistema chamado AutoNav.
O objetivo é que, cada vez mais, o rover tenha autonomia durante seu deslocamento na superfície marciana, bem como a capacidade de desviar de eventuais obstáculos. O AutoNav é um sistema aprimorado de navegação que produz mapas 3D do terreno à frente do robô, identificando perigos e planejando uma rota de desvio sem a necessidade de comandos adicionais dos controladores da Terra.
Abaixo, veja os primeiros movimentos do rover usando o AutoNav, registrados pelas câmeras de navegação esquerda e direita do veículo:
A engenheira sênior Vandi Verma, do Laboratório de Propulsão a Jato, da NASA, explica que agora o rover poderá "pensar" enquanto dirige. Verma, que também pilota o Perseverance em simulações de possíveis rotas, diz que “o veículo está pensando na direção autônoma enquanto suas rodas estão girando”. Essa habilidade permite que o robô atinja uma velocidade de até 120 m/h, superior à capacidade do Curiosity, que se desloca a 20 m/h com a ajuda de uma versão anterior do AutoNav.
A cratera Jezero foi escolhida como local de pouso da missão porque, no passado distante de Marte, havia ali um grande lago, onde desembocava um rio, formando uma estrutura chamada delta. Se já existiu vida em Marte, suas assinaturas talvez possam ser encontradas ali. O Perseverance vai, então, coletar amostras ao longo de 15 km do delta e, depois, vai armazená-las em tubos que serão resgatados por uma futura missão da NASA em parceria com a Agência Espacial Europeia (ESA), trazendo- as para a Terra, onde acontecerão análises aprofundadas do material.
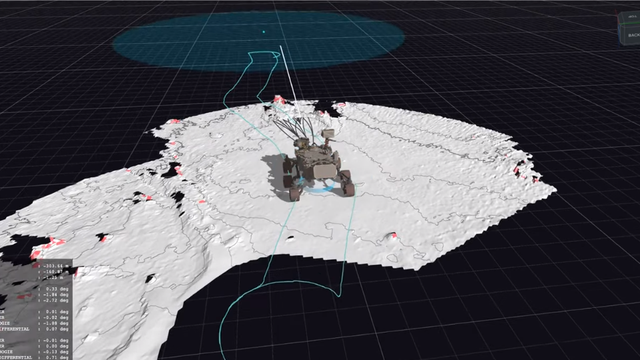
A simulação abaixo mostra o trajeto que o rover percorreu enquanto realizava sua primeira viagem com o recurso de navegação:
Outra vantagem do AutoNav é permitir que o rover chegue a lugares mais distantes, mais rapidamente. “Agora podemos dirigir por esses terrenos mais complexos em vez de contorná-los, algo que não fomos capazes de fazer antes”, explica Jennifer Trosper, que esteve envolvida no desenvolvimento de cada um dos robôs já enviados pela NASA a Marte.
No entanto, o Perseverance não é capaz de operar apenas com o AutoNav. Por isso, uma equipe de especialistas desenvolve uma rota de navegação com o planejamento de atividade do rover. Por conta do atraso da comunicação entre a Terra e Marte, eles não podem simplesmente dirigir o robô em tempo real a distância, mas podem usar as imagens de satélites para, usando óculos 3D, visualizar a superfície marciana ao redor do Perseverance. Uma vez traçada a rota, eles enviam as instruções para o rover, o qual executará os comandos no sol (o dia marciano) seguinte.
As rodas do Perseverance também garantem que ele se desloque com mais rapidez à medida que os comandos são executados. Elas são maiores em diâmetro e mais estreitas do que as rodas do Curiosity, além de serem mais resistentes e proporcionarem maior tração.
Desenvolvido para se deslocar em terrenos irregulares, o Perseverance também conta com recursos adicionais de navegação autônoma, como o ENav, uma combinação de algoritmo e software que detecta perigos com precisão. Já o Vision Compute Element (VCE), que guiou a entrada, descida e aterrissagem do rover, agora é usado em tempo integral para mapear o deslocamento do robô. A equipe não vê a hora de deixar o rover “assumir o controle” de seu deslocamento, mas estará pronta para comandá-lo sempre que necessário.
Fonte: NASA