Robô inspirado em lagartos do deserto pode ser usado na exploração de Marte
Por Gustavo Minari • Editado por Luciana Zaramela |
Pesquisadores da Universidade de Aeronáutica e Astronáutica de Nanjing, na China, desenvolveram um novo tipo de robô de quatro patas inspirado na anatomia peculiar dos lagartos, que pode ser utilizado na exploração da superfície de Marte no futuro.
Segundo os cientistas envolvidos no projeto, o bot multifuncional possui uma estrutura corporal extremamente flexível e adaptável, capaz de replicar com eficiência a maioria dos movimentos e o estilo de locomoção do réptil que vive no deserto.
“Pelo fato de a superfície marciana ser composta por solos granulares e rochas de vários tamanhos, os rovers atuais podem ter dificuldades para se locomover em ambientes deste tipo. Para superar esses problemas, criamos um robô rastejante quadrúpede”, explica o professor de engenharia Guangming Chen, coautor do estudo.
Inspiração na natureza
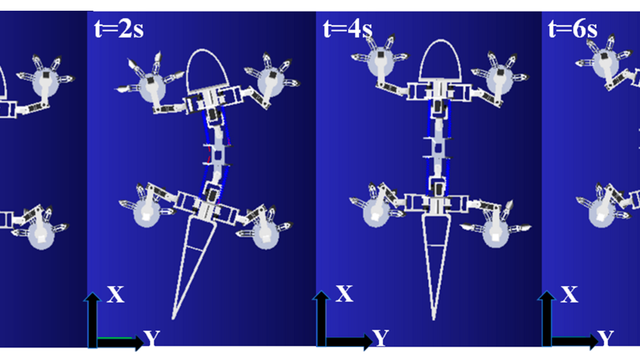
O robô criado pela equipe do professor Chen é composto por uma estrutura ajustável semelhante a uma coluna vertebral. Para replicar o movimento rastejante típico dos lagartos, cada uma das quatro pernas apresenta duas dobradiças e uma engrenagem que provoca uma oscilação entre elas.
Essas articulações do quadril — que conectam a estrutura da coluna com as pernas do robô — são compostas por dois servos e um mecanismo com quatro articulações que permitem que o bot se levante sem perder o equilíbrio. Os pés possuem quatro dedos flexíveis, duas dobradiças e uma garra.
“A estrutura da perna utiliza um mecanismo com quatro ligações, que garante um movimento de elevação constante. O pé consiste em um tornozelo ativo e uma almofada redonda com quatro dedos flexíveis, eficazes para agarrar solos e rochas como lagartos no meio do deserto”, acrescenta Chen.
Modelo impresso em 3D
Os primeiros testes para avaliar a eficácia do robô foram realizados em simulações com modelos digitais, capazes de replicar o movimento dos lagartos com exatidão. Em seguida, os pesquisadores criaram um protótipo usando materiais de resina impressos em 3D, um painel de controle e uma bateria de lítio.
Ao colocar o bot para se locomover em ambientes reais, os cientistas descobriram que ele consegue se movimentar com facilidade em terrenos rochosos e acidentados, parecidos com aqueles que podem ser encontrados na superfície do planeta vermelho.
“Queremos desenvolver agora modelos de aprendizagem de máquina para permitir que o robô adapte seus movimentos e diferentes tipos de terreno. Além disso, planejamos introduzir um sistema capaz de fornecer alimentação contínua para que ele não precise ser recarregado com frequência”, encerra Chen.
Fonte: Biomimetics