Cão-robô consegue se levantar e andar sobre duas pernas
Por Gustavo Minari • Editado por Douglas Ciriaco |
Pesquisadores do Instituto Politécnico de Worcester (WPI), nos Estados Unidos, em parceria com a Universidade ShanghaiTech, na China, desenvolveram um robô quadrúpede que consegue se equilibrar nas patas traseiras para caminhar como se fosse um animal de duas pernas.
Segundo os cientistas envolvidos no projeto, essa transformação de quadrúpede em bípede em tempo real não requer grandes modificações técnicas ou mecânicas, precisando apenas de um software inteligente especializado e um robô de quatro patas convencional.
“Os robôs bípedes geralmente têm mais liberdade nas pernas para permitir uma locomoção dinâmica e adaptativa. No entanto, estamos focando no aspecto multimodal para colher os benefícios dos dois mundos: a estabilidade e velocidade dos quadrúpedes e a manipulabilidade e o ganho de altura operacional dos bípedes”, explicou o engenheiro e autor principal do estudo André Rosendo ao site IEEE Spectrum.
Sobre duas pernas
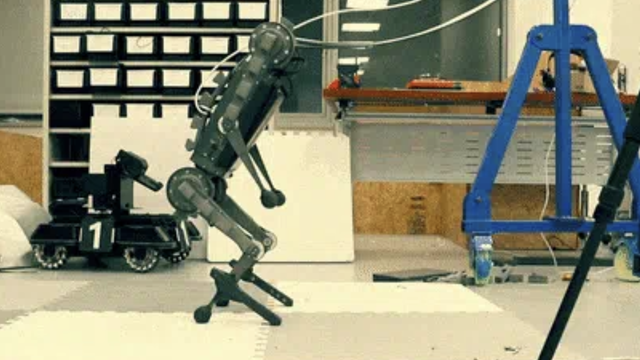
Para dar ao robô a capacidade de se levantar e caminhar sobre duas pernas, os pesquisadores instalaram apêndices impressos em 3D nas duas patas traseiras do bot, permitindo que ele equilibre e equalize todo o peso do corpo sobre elas sem cambalear ou cair para os lados.
Essa abordagem fornece um suporte adicional para que o robô possa ficar de pé e andar sem muitas dificuldades, já que o centro gravitacional de toda sua estrutura permanece estável durante o processo de marcha, que ainda ocorre de forma lenta e cadenciada, como se o bot estivesse dando os primeiros passos.
“É importante lembrar que este é um robô que não foi projetado para andar como um bípede, então, em certo sentido, você tem um software lutando para fazer o hardware funcionar de uma maneira com a qual não está familiarizado e muito menos otimizado”, acrescentou Rosendo.
Evolução quase natural
Quando está na posição vertical, o robô consegue andar graças a um sistema de treinamento desenvolvido em um ambiente de simulação e depois transferido para o mundo real. Com ajuda de pequenas hastes de fibra de carbono, é possível emular a mesma estabilidade passiva dos pés, dando ao bot todo o equilíbrio necessário para se locomover.
Segundo os cientistas, o próximo passo do que eles chamam “processo evolutivo natural” será permitir que o robô, além de ficar em pé, consiga manipular objetos com as patas dianteiras, aproveitando a velocidade de deslocamento do modo quadrúpede e as habilidades manuais quando ele se transformar em bípede.
“Já temos alguns resultados preliminares sobre escalar lugares mais altos que o centro de gravidade do próprio robô. Após mudanças mecânicas nos membros anteriores, avaliaremos melhor o manuseio complexo que será necessário fazer ao exigirmos o uso das duas mãos ao mesmo tempo, algo raro nas máquinas atuais”, encerrou André Rosendo.
Fonte: IEEE Spectrum