Cão-robô aprende a andar sozinho em apenas uma hora
Por Alveni Lisboa • Editado por Douglas Ciriaco | •
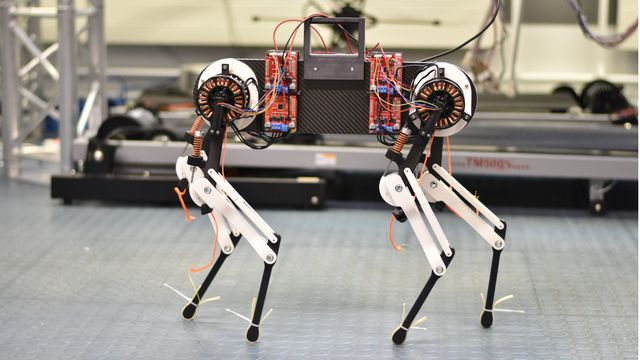
Pesquisadores do Instituto Max Planck para Sistemas Inteligentes (MPI-IS, na sigla em inglês) realizaram um estudo para descobrir como os animais aprendem a andar. Em um experimento conduzido em Stuttgart, na Alemanha, os cientistas construíram um robô de quatro patas do tamanho de um cachorro da raça Labrador.
Esse cão robô, chamado Morti, ajudou a entender melhor como ocorre o desenvolvimento da caminhada, desde o ato de ficar de pé, passando pelo movimento muscular inicial e pelos primeiros (e desengonçados) passos. “Como engenheiros e roboticistas, buscamos a resposta construindo um robô que apresenta reflexos como um animal e aprende com os erros”, diz um dos integrantes do grupo de pesquisa Dynamic Locomotion do MPI-IS, Felix Ruppert.
Ele explicou que o robô foi projetado para ser bastante fiel a um animal de verdade. O protótipo vai tropeçar e escorregar eventualmente, mas não pode fazer isso com frequência, caso contrário há algo errado.
A parte incrível foi que a máquina conseguiu andar em apenas uma hora, graças ao uso da mecânica complexa de pernas inspirada nos músculos de um cachorro de verdade. Um algoritmo baseado em aprendizado de máquina foi inserido para que o experimento aprendesse com seus erros, corrigisse-os e seguisse firme no propósito de andar.
Para que o cão metálico ganhasse vida, foi necessário implantar alguns sensores no pé, que se conectam a uma espécie de medula espinhal virtual, basicamente um programa de computador feito para controlar a atividade motora. Com essa troca de informações, existe o processamento dos dados e comparativo do que se espera da execução e como ela foi feita.
Como foi o processo de criação do robô?
A máquina então começou a corrigir repetir em modo "loop" a atividade, na base da tentativa e erro, sempre adaptando as falhas para melhorar o controle motor até o momento que o movimento foi perfeitamente executado. Em humanos e animais, esses padrões são conduzidos pela rede de neurônios da medula espinhal até o cérebro, que retorna a ordem para executar o movimento.
Quando estamos habituados a um movimento, as redes centrais passam a produzir as contrações musculares de modo automatizado, sem exigir esforço cerebral de execução. Caminhar, respirar, processar alimentos e piscar tornam-se tarefas rítmicas fruto de reflexos corporais involuntários. A não ser que você sinta um tremor no chão ou se desequilibre ao pisar em um buraco, seu corpo fará a atividade normalmente sem ativar seus reflexos.
Os cientistas tentaram adaptar esse padrão corporal de comportamento para o robô. Ele precisaria chegar a um nível no qual andaria praticamente sem precisar transmitir informações dos sensores nas patas para a medula virtual. Em animais recém-nascidos, isso ainda não está bem ajustado, por isso que eles tropeçam e caem com mais facilidade do que adultos.
Robô aprendeu a andar mais rápido que os animais
O resultado mostrou que o robô conseguiu otimizar seus padrões de movimento mais rápido que um animal, em cerca de uma hora. Morti "nasceu" sem saber nada sobre anatomia das pernas ou como um corpo funciona, mas desenvolveu uma inteligência de caminhada automática, como a natureza forneceria para os bebês humanos ou animais.
"O computador produz sinais que controlam os motores das pernas, e o robô inicialmente caminha e tropeça. Os dados fluem de volta dos sensores para o medula espinhal virtual onde os dados do sensor e do CPG são comparados. Se os dados do sensor não corresponderem aos dados esperados, o algoritmo de aprendizado altera o comportamento da caminhada até que o robô ande bem e sem tropeçar", resumiu Ruppert.
Morti consome apenas cinco watts de energia no processo de caminhada, o equivalente a uma lâmpada pequena. O cão robô do estudo usa muito menos eletricidade em comparação com quadrúpedes de grandes fabricantes (centenas de watts), que utilizam controladores complexos para executar as ações.
É claro que robôs de mercado executam muito mais funções, como dançar igual ao Mick Jagger, por isso gastam mais energia. Mas o estudo mostra que é possível otimizar o consumo de energia computacional se empregadas as técnicas corretas de reprodução da anatomia animal.
Aplicações práticas do experimento
"Não podemos pesquisar facilmente a medula espinhal de um animal vivo, mas podemos modelar uma no robô", diz Alexander Badri-Spröwitz, co-autor da publicação e coordenador do grupo de pesquisa.
Ou seja, o experimento pode trazer resultados práticos para entender como bípedes e outros animais quadrúpedes se locomovem, o que poderia ajudar na criação de próteses inteligentes ou técnicas para recuperar movimentos. Ainda é cedo para trazer uma aplicação prática, mas é interessante ver as portas que se abrem a partir de uma pesquisa como essa.
O experimento foi detalhado em um artigo científico intitulado Learning Plastic Matching of Robot Dynamics in Closed-loop Central Pattern Generators, publicado na revista Nature Machine Intelligence no dia 18 de julho de 2022.
Fonte: Nature