Atum inspira cientistas na criação na criação de drones submarinos mais ágeis
Por Gustavo Minari • Editado por Douglas Ciriaco |
Pesquisadores da Universidade de Virgínia, nos EUA, descobriram como construir drones subaquáticos capazes de alterar o modo como nadam em tempo real. Em vez de operar em velocidade de cruzeiro, eles conseguem acelerar ou desacelerar conforme a necessidade, imitando o comportamento de peixes reais.
- Drone de resgate se modifica para entrar em diferentes ambientes
- Drones usam algoritmos para localizar pessoas perdidas em florestas
- Robôs inspirados em pássaros batem asas e podem caçar drones
Para projetar o robô nadador, eles tiveram que resolver o problema da rigidez da peça que funciona como cauda e impulsiona o drone debaixo d`água. Dispositivos duros ou moles demais interferem diretamente na eficiência do nado, podendo causar perda de velocidade e instabilidade de controle.
“Ter uma rigidez na cauda é como ter uma relação de marcha em uma bicicleta. Você só seria eficiente em uma velocidade. Seria como pedalar por São Francisco com uma bicicleta de marcha fixa; você ficaria exausto depois de apenas alguns quarteirões”, explica o professor de engenharia Daniel Quinn, autor principal do estudo.
Inspiração na natureza
Peixes de verdade conseguem ajustar os níveis de rigidez da cauda em tempo real, dependendo da situação. O problema é que não é possível medir esse comportamento instintivo durante o nado, dificultando a construção de modelos capazes de imitar essa ação natural.
A solução encontrada pelos pesquisadores combinou a dinâmica dos fluidos encontrada na água com a biomecânica dos peixes para desenvolver um protótipo com uma cauda ajustável. Eles concluíram que a rigidez deve aumentar de acordo com a velocidade do nado ao quadrado.
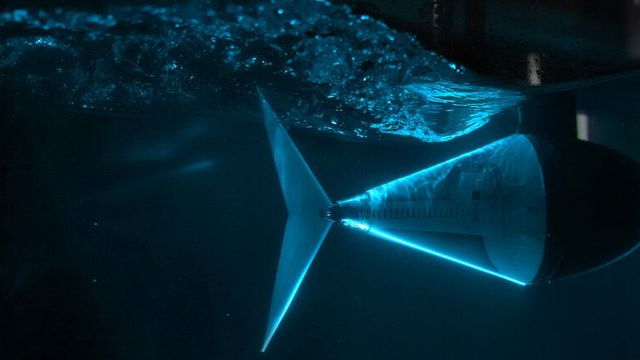
“Para testar nossa teoria, construímos um robô parecido com um peixe que usa um tendão artificial programável para ajustar a rigidez da cauda ao nadar em um canal de água. Nosso robô nadou em uma faixa mais ampla de velocidades, usando quase a metade da energia quando comparado a um robô com cauda de rigidez fixa”, acrescenta Quinn.
Novos modelos
O primeiro modelo de drone nadador foi projetado pelos cientistas seguindo as características físicas de um atum. A ideia agora é aplicar os sistemas de rigidez ajustável de cauda em variantes inspiradas em golfinhos, girinos e até mesmo em robôs que emulem os movimentos suaves das arraias.
O objetivo é criar um veículo subaquático que viaje rapidamente por quilômetros no oceano e depois diminua a velocidade para mapear um recife de coral, ou acelere até o local de um derramamento de óleo e depois prossiga mais lentamente para realizar as medições necessárias em outras regiões.
“Eu não acredito que ficaremos sem projetos tão cedo. Cada animal aquático que vimos até agora nos deu novas ideias sobre como construir robôs nadadores melhores, mais eficientes e totalmente adaptáveis ao ambiente marinho. Há muitos peixes no mar e estamos apenas no começo”, completa o professor Daniel Quinn.
Fonte: University of Virginia