Cientistas criam robô capaz de andar enquanto carrega objetos pesados no espaço
Por Gustavo Minari | Editado por Luciana Zaramela | 19 de Dezembro de 2022 às 12h27
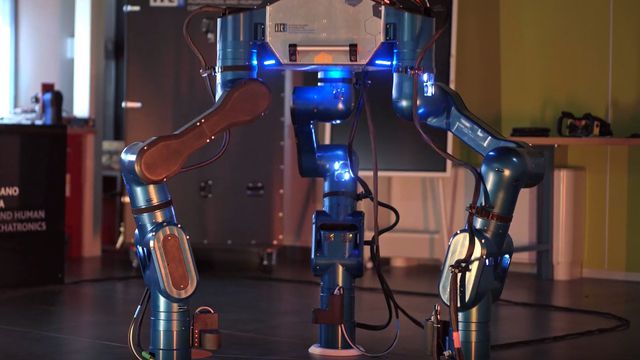
Pesquisadores do Instituto Italiano de Tecnologia (IIT) desenvolveram um robô de três pernas que pode ser utilizado em operações espaciais. O novo bot chamado MARM consegue andar, mover, agarrar e transportar objetos pesados em ambientes com microgravidade.
- Cientistas transformam robô humanoide em "mestre" de Tai Chi
- Robô com "pernas" poderá explorar regiões de difícil acesso na Lua
Segundo os cientistas, o robô pode ajudar astronautas na montagem e manutenção de estruturas complexas enquanto estiverem no espaço — ou até mesmo em outros planetas — permitindo que todo o trabalho duro seja realizado de forma muito mais eficiente e sustentável.
“De fato, enquanto as tecnologias necessárias para o controle, locomoção e manipulação robótica na Terra são bastante avançadas, as condições do ambiente orbital, como a microgravidade, colocam novos desafios à comunidade de pesquisa em robótica”, explica o engenheiro Nikolaos Tsagarakis, autor principal do projeto.
Tripé espacial
O protótipo desenvolvido pela equipe de Tsagarakis é capaz de desempenhar funções de preensão, transporte e montagem enquanto se move por uma estrutura espacial. Um corpo central une os três membros robóticos, dando ao conjunto a aparência de uma aranha gigante.
Um sistema de encaixe exclusivo serve para alimentar a parte mecânica do bot, enviar e receber dados em tempo real, permitindo otimizar seu desempenho tanto em relação à mobilidade quanto à flexibilidade em ambientes bastante hostis, onde a gravidade é próxima de zero.
“Os três membros do MARM, que se conectam à base central da pelve, representam a principal diferença deste robô em relação às tecnologias desenvolvidas anteriormente, dando ao bot maior flexibilidade de locomoção e manipulação, permitindo o transporte, montagem e instalação de cargas pesadas”, acrescenta Tsagarakis.
Na prática
Durante os testes realizados em laboratório, o MARM utilizou suas três patas robóticas para se deslocar e agarrar componentes modulares em uma estação espacial simulada com 1,2 metro de largura e 0,2 metro de espessura, pesando aproximadamente 12 kg.
Além disso, graças à disposição dos três membros, o robô mostrou ser capaz de realizar movimentos de corpo inteiro, enquanto os membros usados para ancoragem podem facilitar a operação de montagem ajustando sua base pélvica central para reduzir a força necessária.
“No futuro, nosso robô poderá ser usado para recolher uma carga útil e se deslocar enquanto transporta o objeto, montando-o assim que chegar ao local escolhido. Precisamos agora avaliar sua viabilidade em um simulador físico antes de, definitivamente, mandá-lo para o espaço”, encerra Nikolaos Tsagarakis.
Fonte: TechXplore