Robô gentil ajuda pessoas a se vestirem sem machucar ninguém
Por Gustavo Minari • Editado por Douglas Ciriaco |
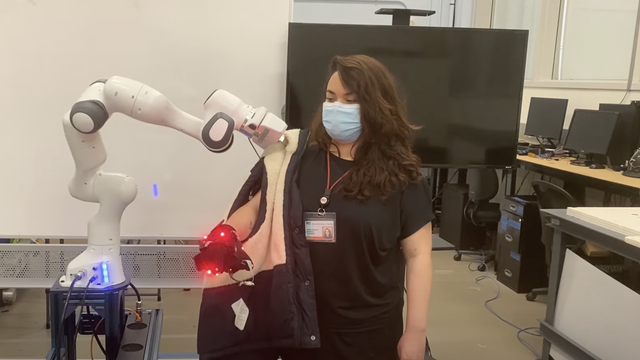
Que tal ter um robô que o ajuda a se vestir? Essa tarefa pode ser extremamente útil para pessoas com deficiências físicas ou mobilidade reduzida. Pensando nisso, pesquisadores do Laboratório de Ciência da Computação e Inteligência Artificial do MIT (CSAIL) criaram um algoritmo que ajuda a máquina a interagir com seres humanos sem machucá-los.
Em vez de evitar um esbarrão, por exemplo, o bot consegue encontrar movimentos mais eficientes dentro de um limite aceitável de impacto. Isso garante uma interação mais natural e “instintiva”, sem abrir mão da segurança física da pessoa que precisa da ajuda do robô para vestir uma roupa.
“O desenvolvimento de algoritmos para evitar danos físicos sem impactar desnecessariamente a eficiência da tarefa é um desafio crítico. Ao permitir que os robôs causem impactos não prejudiciais aos humanos, nosso método pode encontrar trajetórias eficientes para vestir um ser humano com uma garantia de segurança”, diz o estudante de doutorado do MIT Shen Li, autor principal do projeto.
Toque suave
Um robô programado sem esse novo algoritmo poderia ter um comportamento desajeitado ao tentar ajudar uma pessoa a se vestir. Em muitos casos, ele poderia até causar ferimentos por conta da falta de capacidade para “dosar” sua força. Por outro lado, se a programação focasse apenas na segurança, isso poderia fazer com que o robô parasse de se mover para não machucar a pessoa.
O que os pesquisadores do MIT fizeram foi encontrar um meio termo, permitindo um movimento robótico que prevê impactos seguros e previne colisões. Isso dá à máquina a capacidade de fazer contato com um humano para realizar determinada tarefa, contanto que o choque durante essa interação seja inofensivo.
Para dar essa noção ao robô, os cientistas usaram vários modelos possíveis de ação e reação, imitando o comportamento humano diante de situações imprevisíveis. Conforme o algoritmo absorve mais dados, o bot consegue refinar a qualidade dos movimentos para realizar uma tarefa específica.
Os testes
O cálculo das diversas variáveis possíveis foi feito a partir de cenários diferentes, com atividades corriqueiras do dia a dia. Para uma simples tarefa de vestir uma blusa, por exemplo, o robô tinha que levar em conta que pessoa poderia se mover, fazer movimentos bruscos, ou simplesmente levantar o braço para checar mensagens no celular.
O algoritmo também ajuda o robô a “perceber” com quem interage, já que uma criança teria um comportamento diferente de um idoso, ou de uma pessoa com deficiência, ao precisar de ajuda para vestir um casaco. Para cumprir sua tarefa diante dessa situação, o bot combina vários modelos pré-programados em vez de depender de apenas um único sistema de IA.
“Esta abordagem combina a teoria dos conjuntos, restrições de segurança com consciência humana, previsão de movimento e controle de feedback para uma interação segura. Essa tecnologia pode ser aplicada a uma ampla variedade de cenários, permitindo que os robôs forneçam ajuda física para pessoas com problemas de mobilidade”, completa o professor de robótica da Universidade Carnegie Mellon Zackory Erickson, que também participou do projeto.
Fonte: MIT CSAIL