Cientistas usam "telecinese" para controlar robôs à distância
Por Gustavo Minari • Editado por Douglas Ciriaco |
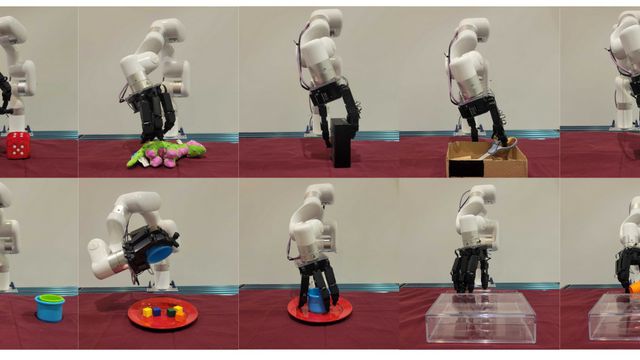
Pesquisadores da Universidade Carnegie Mellon (CMU), nos EUA, desenvolveram um novo sistema que permite que humanos controlem mãos robóticas remotamente. Para operar o dispositivo, o usuário precisa apenas demonstrar os movimentos desejados na frente de uma câmera.
- Braço robótico controlado pela mente restaura a sensação do toque
- Cientistas criam braço robótico capaz de achar até itens perdidos em uma bolsa
Segundo os cientistas, esse tipo de controle telecinético pode ser aplicado no treinamento de robôs altamente especializados, permitindo que essas máquinas sejam operadas à distância em situações cotidianas, ou até mesmo em ambientes inacessíveis para os seres humanos.
“Trabalhos anteriores nesta área dependem de luvas, marcadores de movimento ou uma configuração com várias câmeras calibradas. Em vez disso, nosso sistema funciona usando uma única câmera não calibrada, permitindo que o usuário esteja em qualquer lugar e consiga operar o robô com sucesso”, explica o professor de robótica Deepak Pathak, coautor do estudo.
Traduzindo movimentos
O novo sistema desenvolvido pelos pesquisadores é baseado em um modelo computacional, capaz de traduzir os movimentos das mãos humanas em uma série de instruções coordenadas que servem para orientar e controlar o funcionamento de um robô a quilômetros de distância.
Analisando uma única imagem bidimensional, esse sistema consegue derivar os movimentos realizados pela mão humana transferindo-os para um espaço tridimensional. O software então faz uma combinação entre as articulações da mão de verdade e da mão robótica, garantindo uma ação espelhada em tempo real.
“Como as mãos humanas e robóticas diferem em forma, tamanho e estrutura, essa tradução é limitada, principalmente com uma única imagem. Nosso sistema oferece uma maneira natural e de baixo custo de ensinar robôs por meio de demonstrações, em vez de segurá-lo de forma cinestésica, usando uma luva ou traje para capturar os movimentos”, acrescenta Pathak.
Telecinese
Para treinar o sistema de controle telecinético, os pesquisadores construíram modelos baseados em imagens 3D de mãos humanas e dispositivos de visão computacional. Essa abordagem permite que usuários não treinados também possam operar robôs à distância para realizar qualquer tipo de tarefa ou manipulação de objetos.
Os utilizadores precisam apenas ficar em frente a uma câmera RGB e fazer os movimentos da mão ou do braço que eles gostariam que o robô replicasse. O sistema codifica esses dados, transformando-os em sinais mecânicos que serão transferidos para o dispositivo robótico em milésimos de segundo.
“A telecinese robótica permitirá o treinamento de robôs em uma variedade maior de configurações, inclusive em residências, onde eles poderão realizar tarefas cotidianas. Usando apenas uma única câmera, nosso sistema pode ser controlado a partir de em qualquer lugar do mundo, tornando essa operação remota acessível a qualquer pessoa”, encerra o professor Deepak Pathak.
Fonte: Carnegie Mellon University