Cientistas criam garra robótica inspirada nos tentáculos da água-viva
Por Gustavo Minari • Editado por Douglas Ciriaco |
Pesquisadores da Escola de Engenharia e Ciências Aplicadas da Universidade Harvard, nos Estados Unidos, desenvolveram uma garra robótica inspirada nos tentáculos de uma água-viva, capaz de se prender e segurar objetos extremamente frágeis sem danificá-los.
Segundo os cientistas, esse novo sistema não depende de sensores incorporados, mecanismos complexos ou algoritmos avançados de aprendizagem de máquina para agarrar objetos irregulares, ou que possuam uma estrutura mais delicada, e possam ser facilmente quebrados por mãos robóticas convencionais.
“Esta nova abordagem complementa as soluções existentes, substituindo garras simples e tradicionais que exigem estratégias de controle complexas, por filamentos extremamente compatíveis e morfologicamente adaptáveis, que podem operar com controle muito simples”, explica o professor de engenharia Robert Wood, orientador do estudo.
Inspiração na natureza
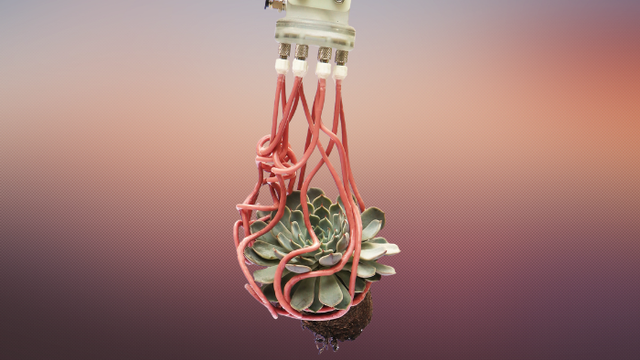
A garra robótica macia desenvolvida pela equipe do professor Wood possui uma coleção de tentáculos finos, capazes de envolver e prender objetos de um jeito muito semelhante à forma como as águas-vivas caçam e coletam suas presas naturalmente no fundo do mar.
Individualmente, esses tentáculos ou filamentos feitos de borracha, não são muito fortes. No entanto, quando são inflados e colocados para trabalharem juntos, os apêndices escorregadios são capazes de segurar objetos bem mais pesados e totalmente disformes.
“Como cada tentáculo individual não consegue se agarrar com força aos objetos, cargas delicadas como frutas e plantas podem ser capturadas sem risco de danos, tornando esse sistema muito mais eficiente para lidar com coisas quebradiças”, acrescenta a pós-doutoranda em engenharia Kaitlyn Becker, autora principal do estudo.
União faz a força
Os filamentos funcionam por meio de tubos de borracha pressurizados que podem ser inflados conforme a necessidade. Depois de se prender ao objeto, basta aliviar a pressão para soltá-lo. Embora o sistema não possua uma precisão tão eficiente quanto a da mão humana, os tentáculos se aderem facilmente após algumas tentativas.
Segundo os pesquisadores, essa forma de trabalhar em conjunto, combinando a força de cada tentáculo, pode ser adaptada para aplicações como colheita e distribuição de frutas e vegetais macios, manuseio de tecidos delicados em ambientes médicos ou até mesmo no transporte de vidros e outros materiais instáveis.
“O emaranhamento permite que cada filamento compatível se adapte localmente a um objeto alvo, levando a uma compreensão topológica mais segura e suave. Isso faz com o sistema seja relativamente independente, expandindo consideravelmente a capacidade de alcance de uma garra robótica”, encerra o professor Robert Wood.